矩阵的数学定义

1 矩阵类型
1.1 m×n 阶矩阵
由 m×n 个数 aij 排成的m行n列的数表称为m行n列的矩阵,简称m×n矩阵。
记作:
$$\mathbf{A}=\begin{bmatrix}a_{11}&a_{12}&\cdots&a_{1n}\\a_{21}&a_{22}&\cdots&a_{2n}\\a_{31}&a_{32}&\cdots&a_{3n}\\vdots&\vdots&\ddots&\vdots\\a_{m1}&a_{m2}&\cdots&a_{mn} \end{bmatrix}$$
- 这 m×n 个数称为矩阵 A 的元素,简称为元;
- 数 aij 位于矩阵 A 的第 i 行第 j 列,称为矩阵 A 的 (i,j) 元;
- 以数 aij 为 (i,j) 元的矩阵可记为 (aij) 或 (aij)m×n;
- m×n 矩阵 A 也记作 Amn;
1.2 方阵(n阶矩阵)
行数 和 列数 相等的矩阵,称为方阵;
行数 与 列数 都等于 n 的矩阵称为 n 阶矩阵 或 n 阶方阵。
记作:
$$\mathbf{A}=\begin{bmatrix}a_{11} & a_{12} & \cdots & a_{1n} \\a_{21} & a_{22} & \cdots & a_{2n} \\a_{31} & a_{32} & \cdots & a_{3n} \\vdots & \vdots & \ddots & \vdots \\a_{n1} & a_{n2} & \cdots & a_{nn}\end{bmatrix}$$
1.3 零矩阵
所有元素都为零的矩阵,称为零矩阵。
即:
$$\mathbf{A}=\begin{bmatrix}0&0&\cdots&0\\ 0&0&\cdots&0\\ \vdots&\vdots&\ddots&\vdots\\ 0&0&\cdots&0\end{bmatrix}$$
1.4 单位矩阵
n 阶方阵,且对角元素为 1,其他元素为 0的矩阵。
记作:
$$\mathbf{I_n}=\begin{bmatrix}1&0&\cdots&0&0\\ 0&1&\cdots&0&0\\ \vdots&\vdots&\ddots&\vdots&\vdots\\ 0&0&\cdots&1&0\\ 0&0&\cdots&0&1 \end{bmatrix}$$
1.5 对角矩阵
除了主对角线之外的元素都为 0 的方阵,称为 对角矩阵。
即:
$$\mathbf{A}=\begin{bmatrix}a&0&\cdots&0\\0&b&\cdots&0\\ \vdots&\vdots&\ddots&\vdots\\0&0&\cdots&c\end{bmatrix}$$
1.6 上三角和下三角矩阵
矩阵的上半部分或下半部分(除对角线外)的元素为 0。
1.7 稀疏矩阵
大部分元素为 0 的矩阵。
1.8 对称矩阵
矩阵等于其转置矩阵。
1.9 实矩阵与复矩阵
元素是 实数 的矩阵称为 实矩阵,元素是 复数 的矩阵称为 复矩阵。
2 矩阵的基本运算
矩阵的基本运算包括矩阵的 加法,减法,数乘,乘法,转置,共轭 和 共轭转置。在游戏中的转换运用,用的基本都是乘法的性质。
矩阵的 加减法 和矩阵的 数乘 合称 矩阵的线性运算 。
2.1 加法
矩阵的加法满足下列运算律 (A,B,C 必须都是 同型矩阵 ):
$$A+B = B+A \quad$$ $$(A+B)+C=A+(B+C)$$
具体如下:
$$\begin{bmatrix}i_0&j_0&k_0\\l_0&m_0&n_0\end{bmatrix}+\begin{bmatrix}i_1&j_1&k_1\\l_1&m_1&n_1\end{bmatrix}=\begin{bmatrix}i_0+i_1&j_0+j_1&k_0+k_1\\l_0+l_1&m_0+m_1&n_0+n_1\end{bmatrix}$$
import numpy as np
# 创建2个3x3的方阵
A = np.eye(3)
B = np.eye(3)
print(f"A:\n{A}")
print(f"B:\n{B}")
print(f"A+B:\n{A+B}")
A:
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
B:
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
A + B:
[[2. 0. 0.]
[0. 2. 0.]
[0. 0. 2.]]
2.2 减法
同矩阵的加法一样,满足以下运算规律 (A,B,C 必须都是 同型矩阵 ):
$$A-B = -B+A \quad$$ $$(A-B)+C=A+(C-B)$$
具体如下:
$$\begin{bmatrix}i_0+i_1 & j_0+j_1 & k_0+k_1 \\l_0+l_1 & m_0+m_1 & n_0+n_1\end{bmatrix}-\begin{bmatrix}i_1 & j_1 & k_1 \\l_1 & m_1 & n_1\end{bmatrix}=\begin{bmatrix}i_0 & j_0 & k_0 \\l_0 & m_0 & n_0 \end{bmatrix}$$
import numpy as np
# 创建2个3x3的方阵
A = np.eye(3)
B = np.eye(3)
print(f"A:\n{A}")
print(f"B:\n{B}")
print(f"A - B:\n{A-B}")
A:
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
B:
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
A - B:
[[0. 0. 0.]
[0. 0. 0.]
[0. 0. 0.]]
2.3 数乘(与实数相乘)
矩阵的数乘满足以下规律:
$$(\gamma\mu)\mathbf{A} = \gamma(\mu\mathbf{A})$$ $$(\gamma+\mu)\mathbf{A}=\gamma\mathbf{A}+\mu\mathbf{A}$$ $$\gamma(\mathbf{A}+\mathbf{B})=\gamma\mathbf{A}+\gamma\mathbf{B}$$ $$k\mathbf{A}=\begin{bmatrix}ka_{11} & ka_{12} & \cdots & ka_{1n} \\ka_{21} & ka_{22} & \cdots & ka_{2n} \\ka_{31} & ka_{32} & \cdots & ka_{3n} \\ \vdots & \vdots & \ddots & \vdots \\ ka_{m1} & ka_{m2} & \cdots & ka_{mn} \end{bmatrix}$$
import numpy as np
# 创建1个3x3的方阵
A = np.eye(3)
print(f"A:\n{A}")
print(f"A * 3:\n{A*3}")
A:
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
A * 3:
[[3. 0. 0.]
[0. 3. 0.]
[0. 0. 3.]]
2.4 矩阵乘法(与矩阵相乘)
矩阵乘法是线性代数中的一个基本操作,两个矩阵仅当左边矩阵 $A_{mp}$ 的列数 p 和右边矩阵 $B_{pn}$ 的行数 p 相等时,才能进行乘法运算,其乘积 C 是一个 m×n 矩阵。
- 结果矩阵的元素 $C_{ij}$ 是通过将矩阵 A 的第 i 行与矩阵 B 的第 j 列对应元素相乘然后求和得到的。
- 结果矩阵的维度由左矩阵的行数和右矩阵的列数决定。
$$\mathbf{C}=(c_{ij})_{m×n}=\mathbf{A}_{m×p}\mathbf{B}_{p×n}$$$$\mathbf{c}_{ij}=\sum_{l=1}^n\mathbf{a}_{il}\mathbf{b}_{lj}$$
其满足 结合律 和 分配律;
$$(\mathbf{AB})\mathbf{C}=\mathbf{A}(\mathbf{BC})$$ $$(\mathbf{A+B})\mathbf{C}=\mathbf{AC+BC}$$ $$\mathbf{C}(\mathbf{A+B})=\mathbf{CA+CB}$$
例如:一个 2×3 矩阵与 3×2 矩阵相乘,如下
$$\begin{bmatrix}1&0&2\\ -1&3&1 \end{bmatrix} \times \begin{bmatrix}3&1\\ 2&1\\ 1&0 \end{bmatrix} =$$ $$ \begin{bmatrix}(1×3+0×2+2×1)&(1×1+0×1+2×0)\\ (-1×3+3×2+1×1) &(-1×1+3×1+1×0)\end{bmatrix} =$$ $$\begin{bmatrix}5&1\\ 4&2 \end{bmatrix}$$
- 矩阵的乘法不满足交换律,即 AB ≠ BA ;
- 对于任何矩阵$A$,与单位矩阵$I$相乘,结果仍然是$A$ ,即 $AI = IA = A$ ;
- 两个矩阵乘积的转置等于各自转置的乘积的转置,即 $(AB)^T = B^T A^T$ ;
- 如果矩阵 A 有逆矩阵$A^{-1}$,则 A 与$A^{-1}$的乘积是单位矩阵,即 $AA^{-1} = A^{-1}A = I$ ;
- 与零矩阵相乘的结果是零矩阵;
import numpy as np
# 创建1个3x2的矩阵
A = np.mat([
[ 1, 0, 2],
[-1, 3, 1]])
#创建1个2*3的矩阵
B = np.mat([
[3, 1],
[2, 1],
[1, 0]])
print(f"A:\n{A}")
print(f"B:\n{B}")
print(f"A * B:\n{A*B}")
A:
[[ 1 0 2]
[-1 3 1]]
B:
[[3 1]
[2 1]
[1 0]]
A * B:
[[5 1]
[4 2]]
2.5 转置(Transposition)
把矩阵A的行和列互相交换所产生的矩阵称为A的转置矩阵,这一过程称为矩阵的转置;
即:
$$\text{A}=\begin{bmatrix}a & b & c \\ d & e & f \end{bmatrix}$$ $$\text{A}^T=\begin{bmatrix}a & d \\b & e \\c & f \end{bmatrix}$$ $$a_{ij}=a^T_{ji}$$
矩阵的转置满足以下运算律:
$$(\mathbf{A}^T)^T=\mathbf{A}$$ $$(\gamma\mathbf{A})^T=\gamma\mathbf{A}^T$$ $$(\mathbf{A}\mathbf{B})^T=\mathbf{B}^T\mathbf{A}^T$$ $$(\mathbf{A+B})^T=\mathbf{A}^T+\mathbf{B}^T$$
- 如果一个矩阵 A 满足 $A=A^T$ ,则该矩阵 A 被称为 对称矩阵 ;
import numpy as np
# 创建1个3x3的方阵
A = np.mat([
[1, 2, 3],
[4, 5, 6]])
print(f"A:\n{A}")
print(f"A transpose:\n{np.transpose(A)}")
A:
[[1 2 3]
[4 5 6]]
A transpose:
[[1 4]
[2 5]
[3 6]]
2.6 共轭(Conjugate)
矩阵的共轭包括取它的每个元素的复共轭。这主要适用于复数矩阵。
矩阵 A 的共轭定义为:
$$\overline{\mathbf{A}}$$
例如:一个 2X2 的复数矩阵,其共轭方式如下
$$\mathbf{A}=\begin{bmatrix}3+i & 5 \\2-2i & i\end{bmatrix}$$ $$\overline{\mathbf{A}}=\begin{bmatrix}3-i & 5 \\2+2i & -i\end{bmatrix}$$
import numpy as np
# 创建1个2x2的方阵
A = np.mat([
[3+1j, 5],
[2-2j, 1j]])
print(f"A:\n{A}")
print(f"A conjugate:\n{np.conjugate(A)}")
A:
[[3.+1.j 5.+0.j]
[2.-2.j 0.+1.j]]
A conjugate:
[[3.-1.j 5.-0.j]
[2.+2.j 0.-1.j]]
2.7 共轭转置(Hermitian Transpose)
矩阵的共轭转置是矩阵的转置然后求每个元素的复共轭,它也被称为厄米转置。
矩阵 A 的共轭转置定义为:
$$(A^H) \text{或} (A^*)$$
也可以写成:
$$\mathbf{A}^*=(\overline{\mathbf{A}})^T=\overline{\mathbf{A}^T}$$
例如:一个 2X2 的复数矩,其共轭转置方式如下
$$\mathbf{A}=\begin{bmatrix}3+i & 5 \\2-2i & i \end{bmatrix}$$ $$\mathbf{A}^*=\begin{bmatrix}3-i & 2+2i \\5 & -i \end{bmatrix}$$
import numpy as np
# 创建1个2x2的方阵
A = np.mat([
[3+1j, 5],
[2-2j, 1j]])
print(f"A:\n{A}")
print(f"A hermitian transpose:\n{np.transpose(np.conjugate(A))}")
A:
[[3.+1.j 5.+0.j]
[2.-2.j 0.+1.j]]
A hermitian transpose:
[[3.-1.j 2.+2.j]
[5.-0.j 0.-1.j]]
3 矩阵分解
3.1 LU 分解(LU Decomposition)
3.1.1 LU 分解的定义
将一个矩阵分解为两个矩阵乘积的方法,其中一个是下三角矩阵$L$,另一个是上三角矩阵$U$。具体来说,对于一个给定的方阵 $A$,LU 分解将其表示为:
$$A = LU$$
其中:
- $L$ 是一个下三角矩阵(Lower triangular matrix),其对角线元素为 1。
- $U$ 是一个上三角矩阵(Upper triangular matrix)。
有时,LU 分解还包括一个置换矩阵 $P$,用于处理矩阵的行交换,以提高数值稳定性。这种情况下,分解形式为:
$$PA = LU$$
其中:
- $P$ 是一个置换矩阵(Permutation matrix),用于表示行交换。
3.1.2 LU 分解的步骤
- 初始化:开始时,矩阵 $L$ 初始化为单位矩阵,矩阵 $U$ 初始化为零矩阵。
- 分解过程:
- 对于每一列,选择一个主元(pivot),通常是当前列中绝对值最大的元素。
- 通过行交换将主元移动到对角线位置(如果使用置换矩阵 $P$,则记录行交换)。
- 使用高斯消去法,将当前列下方的元素消为零,并更新 $L$ 和 $U$ 矩阵。
import numpy as np
def lu_decomposition(matrix):
n = matrix.shape[0]
L = np.zeros((n, n))
U = np.zeros((n, n))
for i in range(n):
# Upper Triangular
for k in range(i, n):
sum = 0
for j in range(i):
sum += (L[i][j] * U[j][k])
U[i][k] = matrix[i,k] - sum
# Lower Triangular
for k in range(i, n):
if i == k:
L[i][i] = 1 # Diagonal as 1
else:
sum = 0
for j in range(i):
sum += (L[k][j] * U[j][i])
L[k][i] = (matrix[k,i] - sum) / U[i][i]
return L, U
# 示例矩阵
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]],
dtype=float)
L, U = lu_decomposition(A)
print(f"矩阵A:\n{A}\n")
print(f"矩阵A的下三角矩阵 L:\n{L}\n")
print(f"矩阵A的上三角矩阵 U:\n{U}")
矩阵A:
[[1. 1. 2.]
[1. 3. 4.]
[1. 1. 1.]]
矩阵A的下三角矩阵 L:
[[1. 0. 0.]
[1. 1. 0.]
[1. 0. 1.]]
矩阵A的上三角矩阵 U:
[[ 1. 1. 2.]
[ 0. 2. 2.]
[ 0. 0. -1.]]
3.1.3 LU 分解的应用
LU 分解在许多数值计算中有广泛的应用,包括:
- 求解线性方程组:通过将方程组 $Ax = b$ 转化为两个三角方程组 $Ly = b$ 和 $Ux = y$ 来求解。
- 计算矩阵的逆:通过求解多个线性方程组来计算矩阵的逆。
- 计算行列式:矩阵 $A$ 的行列式可以通过 $U$ 矩阵的对角线元素的乘积来计算。
3.2 QR 分解(QR Decomposition)
将一个矩阵分解为一个正交矩阵和一个上三角矩阵的乘积。
3.3 奇异值分解(SVD)
将一个矩阵分解为三个特殊矩阵的乘积,广泛应用于信号处理和统计学。
4 特殊矩阵及运算
4.1 矩阵的行列式(Determinant)
4.1.1 定义
矩阵的行列式是一个标量值,它是一个方阵(即 行数 和 列数 相等的矩阵)的属性,表示矩阵的一种特征值,可以从矩阵的元素按照特定的算术规则计算得出。
4.1.2 计算方法
一个 n×n 的正方矩阵 A 的 行列式 记为 det(A) 或者 |A| ,其计算方法依赖于矩阵的大小。
2x2矩阵:
$$\text{det}(A)=\mathbf{\text{det}\begin{pmatrix}a & b \\c & d \end{pmatrix}}=(a)(d)-(b)(c)$$
import numpy as np
def determinant2x2(matrix):
a = matrix[0,0]
b = matrix[0,1]
c = matrix[1,0]
d = matrix[1,1]
return a*d - b*c
# 创建1个2x2的方阵
A = np.mat([
[1, 2],
[3, 4]])
print(f"A:\n{A}")
print(f"det(A): {round(determinant2x2(A))}")
A:
[[1 2]
[3 4]]
det(A): -2
3×3矩阵:
$$\text{det}(A)=\mathbf{\text{det}\begin{pmatrix}a & b & c \\d & e & f \\g & h & i \end{pmatrix}}$$ $$= a(ei-fh) - b(di-fg) + c(dh-eg)$$ $$=aei+bfg+cdh-afh-bdih-ceg$$
import numpy as np
# 创建1个3x3的方阵
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]])
print(f"A:\n{A}")
print(f"det(A): {round(np.linalg.det(A))}")
A:
[[1 1 2]
[1 3 4]
[1 1 1]]
det(A): -2
高斯消元法:
通过将矩阵的化为上三角矩阵,再计算对角元素的乘积。
LU 分解:
通过 LU 分解 将矩阵分为下三角矩阵(L)和上三角矩阵(U),行列式为
$$\text{det}(A) = \text{det}(L) \cdot \text{det}(U)$$
import numpy as np
# 创建1个3x3的方阵
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]])
L, U = lu_decomposition(A)
print(f"A:\n{A}")
detA = np.linalg.det(L) * np.linalg.det(U)
print(f"det(A): {round(detA)}")
A:
[[1 1 2]
[1 3 4]
[1 1 1]]
det(A): -2
递归展开:
通过 Laplace展开公式递归计算行列式。
$$\text{det}(A) = \left|\mathbf{A}\right| = \sum_{j=1}^{n} (-1)^{i+j} a_{ij} \text{det}(M_{ij})$$
- $M_{ij}$ 是矩阵 A 的 (i,j) 元素的 余子矩阵;
- $(-1)^{i+j} \text{det}(M_{ij})$ 为矩阵 A 的 (i,j) 元素的 代数余子式;
import numpy as np
def minor_matrix(matrix, i, j):
# 删除第i行和第j列
minor = np.delete(np.delete(matrix, i, axis=0), j, axis=1)
return minor
def determinant(matrix):
if matrix.shape == (2,2):
return determinant2x2(matrix)
sum,i = 0,0
for j in range(matrix.shape[1]):
sign = ((-1) ** (i+j))
elem = matrix[i,j]
det = determinant(minor_matrix(matrix,i,j))
sum += sign * elem * det
return sum
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]])
print(f"A:\n{A}")
print(f"det(A): {round(determinant(A))}")
A:
[[1 1 2]
[1 3 4]
[1 1 1]]
det(A): -2
4.1.3 性质
行列交换:交换矩阵的两行(或两列),行列式的符号会改变。
行列倍加:矩阵的一行(或一列)乘以一个常数 ( k ),行列式也乘以 ( k )。
行列相加:矩阵的一行(或一列)加上另一行(或一列)的倍数,行列式不变。
对角矩阵:对角矩阵的行列式等于对角线上所有元素的乘积。
三角矩阵:上三角矩阵或下三角矩阵的行列式等于对角线上所有元素的乘积。
单位矩阵:单位矩阵的行列式为1。
行列式的乘法性质:对于两个 $n \times n$ 矩阵 $A$ 和 $B$,有 $\text{det}(AB) = \text{det}(A) \cdot \text{det}(B)$。
4.1.4 应用
行列式有许多重要的数学和物理意义,其中包括:
线性变换的缩放因子 :在几何上,一个矩阵可以表示一个线性变换,该变换可以是旋转、缩放、倾斜等。行列式的绝对值表示这个线性变换改变空间体积的比例。如果行列式为正,表示保持了空间的定向(如旋转),如果为负,则表示反转了空间的定向(如镜像);
矩阵是否可逆 :如果一个方阵的行列式不为零,则该矩阵是可逆的,也就是说存在一个逆矩阵。如果行列式为零,则矩阵不可逆,称为奇异矩阵;
解线性方程组 :在使用克莱姆法则解线性方程组时,行列式扮演着关键角色。如果方程组的系数矩阵的行列式不为零,则该方程组有唯一解;
特征值问题 :行列式用于求解矩阵的特征值,特征值是矩阵 $A$ 的行列式 $\text{det}(A - \lambda I) = 0$ 的解。
4.2 余子矩阵(Minor Matrix)
4.2.1 定义
给定一个 n 阶方阵 $A_n$ ,删除矩阵 A 中第 i 行和第 j 列后剩下的矩阵称为 A 的 (i, j) 元素的余子矩阵,记作 ($M_{ij}$)。
4.2.2 计算方法
步骤:
- 选择矩阵 $A$ 的一个元素 $a_{ij}$。
- 删除该元素所在的第 $i$ 行和第 $j$ 列。
- 剩下的矩阵即为 $a_{ij}$ 的余子矩阵 $M_{ij}$。
import numpy as np
def minor_matrix(matrix, i, j):
# 删除第i行和第j列
minor = np.delete(np.delete(matrix, i, axis=0), j, axis=1)
return minor
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]])
i,j = 1,1
print(f"A:\n{A}\n")
print(f"其元素({i+1},{j+1})的余子矩阵:\n{minor_matrix(A,i,j)}")
A:
[[1 1 2]
[1 3 4]
[1 1 1]]
其元素(2,2)的余子矩阵:
[[1 2]
[1 1]]
4.2.3 代数余子式(Cofactor)
代数余子式在计算 矩阵的逆 以及 行列式 时非常重要,与余子矩阵 ($M_{ij}$) 相对应的代数余子式定义为:
$$C_{ij} = (-1)^{i+j} \text{det}(M_{ij})$$
- $\text{det}(M_{ij})$ 是余子矩阵的行列式。
import numpy as np
def cofactor(matrix, i, j):
# 删除第i行和第j列
minor = minor_matrix(matrix,i,j)
# 计算余子式的行列式
minor_det = determinant(minor)
# 应用符号
sign = (-1) ** (i + j)
return sign * minor_det
# 示例矩阵
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]])
# 计算矩阵中元素(i,j)的代数余子式
i, j = 1, 1
print(f"矩阵:\n{A}\n")
print(f"元素({i+1},{j+1})的代数余子式: {cofactor(A, i, j)}")
矩阵:
[[1 1 2]
[1 3 4]
[1 1 1]]
元素(2,2)的代数余子式: -1
4.2.4 性质
性质1:如果矩阵 $A$ 是一个 $n \times n$ 的方阵,那么它的每个余子矩阵 $M_{ij}$ 是一个 $(n-1) \times (n-1)$ 的方阵。
性质2:余子矩阵用于计算行列式的展开式(Laplace 展开),即行列式可以通过其余子矩阵的行列式来表示。
4.2.5 应用
行列式的计算:
通过 余子矩阵 和 代数余子式,可以递归地计算高阶矩阵的行列式,通过其任一行(或列)的元素及其对应的余子矩阵的行列式的乘积之和来计算。
$$\text{det}(A) = \sum_{j=1}^{n} (-1)^{i+j} a_{ij} \text{det}(M_{ij})$$
- $a_{ij}$ 是矩阵 A 的 (i,j) 元素;
- $M_{ij}$ 是矩阵 A 的 (i,j) 元素的余子矩阵;
- $\text{det}(M_{ij})$ 是余子矩阵 $M_{ij}$ 的行列式;
矩阵的逆:
通过伴随矩阵和行列式,可以计算矩阵的逆。对于 n 阶方阵 $A_n$ (其行列式不为0),其 逆矩阵 可以通过其 代数余子式矩阵(也称 伴随矩阵 )除以 $A_n$ 的行列式来计算,即:
$$A^{-1} = \frac{1}{\text{det}(A)} \text{adj}(A)$$
- $\text{adj}(A)$ 是 A 的 伴随矩阵 ,即由 A 的所有 代数余子式 组成的矩阵的 转置 ;
线性方程组:
在求解线性方程组时,余子矩阵和伴随矩阵也起到重要作用。
4.3 伴随矩阵(Adjoint Matrix)
4.3.1 定义
伴随矩阵(Adjoint matrix) 在数学中(特别是线性代数中)是与给定的方阵相关的另一个方阵。
对于任何一个 n 阶方阵 $A_n$ (其行列式不为0),其 伴随矩阵 是通过取原矩阵的每个元素的 代数余子式(Cofactor) 并将其 转置(Transpose) 得到的,记作 $\text{adj}(A)$。
4.3.2 计算方法
计算伴随矩阵的步骤如下:
- 计算代数余子式:对于矩阵 $A$ 的每个元素 $a_{ij}$,计算其代数余子式 $C_{ij}$,即 $A$ 删除第 $i$ 行和第 $j$ 列后得到的子矩阵的行列式,再乘以 $(-1)^{i+j}$。
- 构造余子式矩阵:将所有代数余子式 $C_{ij}$ 组成一个矩阵,这个矩阵称为余子式矩阵(Cofactor Matrix)。
- 转置:将余子式矩阵转置,得到伴随矩阵 $\text{adj}(A)$。
def adjoint_matrix(matrix):
# 计算矩阵的行列式
matrix_det = determinant(matrix)
# 如果行列式为0,矩阵不可逆,伴随矩阵不存在
if matrix_det == 0:
raise ValueError("Matrix is singular and cannot have an adjoint.")
# 取原矩阵的每个元素的代数余子式
adj_matrix = np.mat([
[cofactor(matrix,0,0),cofactor(matrix,0,1),cofactor(matrix,0,2)],
[cofactor(matrix,1,0),cofactor(matrix,1,1),cofactor(matrix,1,2)],
[cofactor(matrix,2,0),cofactor(matrix,2,1),cofactor(matrix,2,2)]])
# 将其转置
adj_matrix = np.transpose(adj_matrix)
return adj_matrix
# 示例矩阵
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]])
# 计算伴随矩阵
adjA = adjoint_matrix(A)
print(f"矩阵 A:\n{A}\n")
print(f"矩阵A的伴随矩阵 adj(A):\n{adjA}")
矩阵 A:
[[1 1 2]
[1 3 4]
[1 1 1]]
矩阵A的伴随矩阵 adj(A):
[[-1 1 -2]
[ 3 -1 -2]
[-2 0 2]]
4.3.3 性质
性质1:如果矩阵 ( A ) 是可逆的,那么 ( A ) 的逆矩阵可以表示为:
$$A^{-1} = \frac{1}{\det(A)} \text{adj}(A)$$
- 其中 $\det(A)$ 是矩阵 $A$ 的行列式
性质2:对于两个 $n \times n$ 矩阵 $A$ 和 $B$,其行列式的乘积有如下关系:
$$\text{adj}(AB) = \text{adj}(B) \text{adj}(A)$$
性质3:矩阵 A 与 伴随矩阵 的乘积等于 A 的行列式乘以单位矩阵,即:
$$A \times \text{adj}(A) = \text{adj}(A) \times A = \det(A) \times I$$
# 矩阵 A 与 伴随矩阵 的乘积 等于 A 的行列式乘以单位矩阵
print(f"A * adj(A):\n{np.round(A @ adjA)}\n")
print(f"adj(A) * A:\n{np.round(adjA @ A)}\n")
print(f"det(A) * I:\n{np.round(determinant(A) * np.eye(3))}")
A * adj(A):
[[-2 0 0]
[ 0 -2 0]
[ 0 0 -2]]
adj(A) * A:
[[-2 0 0]
[ 0 -2 0]
[ 0 0 -2]]
det(A) * I:
[[-2. -0. -0.]
[-0. -2. -0.]
[-0. -0. -2.]]
性质4:如果 $A$ 是对角矩阵,那么 $\text{adj}(A)$ 也是对角矩阵,其对角元素是 $A$ 对角元素的代数余子式。
4.4 逆矩阵(Inverse Matrix)
4.4.1 定义
对于一个 n 阶矩阵 A,若存在一个 n 阶矩阵 B,使得 $AB=BA=I_n$ ,则称 B 是 A 的 逆矩阵,记为 $A^{-1}$ ;
4.4.2 计算方法
4.4.2.1 伴随矩阵法
对于 $( n \times n )$ 矩阵 ( A ),其逆矩阵可以通过伴随矩阵 $( \text{adj}(A) )$ 和行列式 $( \det(A) )$ 计算:
$$A^{-1} = \frac{1}{\det(A)} \text{adj}(A)$$
def inverse_matrix(matrix):
# 计算矩阵的行列式
matrix_det = determinant(matrix)
# 如果行列式为0,矩阵不可逆,伴随矩阵不存在
if matrix_det == 0:
raise ValueError("Matrix is singular and cannot have an adjoint.")
inv_matrix = (1 / determinant(matrix)) * adjoint_matrix(matrix)
return inv_matrix
# 计算逆矩阵
invA = inverse_matrix(A)
print(f"矩阵A的逆矩阵 inv(A):\n{invA}\n")
print(f"inv(A) * A = I:\n{np.round(invA @ A)}")
矩阵A的逆矩阵 inv(A):
[[ 0.5 -0.5 1. ]
[-1.5 0.5 1. ]
[ 1. -0. -1. ]]
inv(A) * A = I:
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
4.4.2.2 高斯-约当消去法
通过将矩阵 ( A ) 转化为单位矩阵,同时对单位矩阵进行相同的行变换,最终得到 $( A^{-1} )$
import numpy as np
def gauss_jordan_inverse(matrix):
# 获取矩阵的行数和列数
rows, cols = matrix.shape
# 创建增广矩阵 [matrix | I]
augmented_matrix = np.hstack((matrix, np.eye(rows)))
# 遍历每一列
for i in range(rows):
# 寻找主元
max_row = i + np.argmax(np.abs(augmented_matrix[i:, i]))
# 交换当前行和具有最大主元的行
augmented_matrix[[i, max_row]] = augmented_matrix[[max_row, i]]
# 归一化主元行
augmented_matrix[i] = augmented_matrix[i] / augmented_matrix[i, i]
# 消去其他行的当前列
for j in range(rows):
if j != i:
augmented_matrix[j] = augmented_matrix[j] - augmented_matrix[j, i] * augmented_matrix[i]
# 提取逆矩阵
inverse_matrix = augmented_matrix[:, cols:]
return inverse_matrix
# 示例矩阵
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]],
dtype=float)
invA = gauss_jordan_inverse(A)
print(f"矩阵A:\n{A}\n")
print(f"矩阵A的逆矩阵 inv(A):\n{invA}")
矩阵A:
[[1. 1. 2.]
[1. 3. 4.]
[1. 1. 1.]]
矩阵A的逆矩阵 inv(A):
[[ 0.5 -0.5 1. ]
[-1.5 0.5 1. ]
[ 1. -0. -1. ]]
4.4.2.3 LU 分解法
将矩阵 $A$ 分解为 $LU$ 形式,然后通过解两个三角方程组求解 $ A^{-1} $
import numpy as np
from scipy.linalg import lu, inv
def lu_inverse(matrix):
# Perform LU decomposition
P, L, U = lu(matrix)
# Calculate the inverse of L and U
L_inv = np.linalg.inv(L)
U_inv = np.linalg.inv(U)
# The inverse of the original matrix is U_inv * L_inv
inverse_matrix = U_inv @ L_inv
return inverse_matrix
# 示例矩阵
A = np.mat([
[1, 1, 2],
[1, 3, 4],
[1, 1, 1]],
dtype=float)
invA = lu_inverse(A)
print(f"矩阵A:\n{A}\n")
print(f"矩阵A的逆矩阵 inv(A):\n{invA}")
矩阵A:
[[1. 1. 2.]
[1. 3. 4.]
[1. 1. 1.]]
矩阵A的逆矩阵 inv(A):
[[ 0.5 -0.5 1. ]
[-1.5 0.5 1. ]
[ 1. 0. -1. ]]
4.4.3 性质
唯一性:如果矩阵 $A$ 存在逆矩阵,则逆矩阵是唯一的;
逆矩阵的逆矩阵:$(A^{-1})^{-1} = A$
转置矩阵的逆矩阵:$(A^T)^{-1} = (A^{-1})^T$
矩阵乘积的逆矩阵:$(AB)^{-1} = B^{-1}A^{-1}$
标量乘积的逆矩阵:对于非零标量 ( c ),$(cA)^{-1} = \frac{1}{c}A^{-1}$
$$\mathbf{A_n^{-1}}\mathbf{A_n}=\mathbf{A_n}\mathbf{A_n^{-1}}=\mathbf{I_n}$$ $$\mathbf{A_n^{-1}}=\frac{1}{\left|\mathbf{A_n}\right|} \cdot \text{adj}(A_n)$$
- $\text{adj}(A_n)$ 为 $A_n$ 的 伴随矩阵;
- $\left|\mathbf{A_n}\right|$ 为 $A_n$ 的 行列式;
- $I_n$ 为 n 阶 的 单位矩阵;
相关文章:
 BeiJiaan
BeiJiaan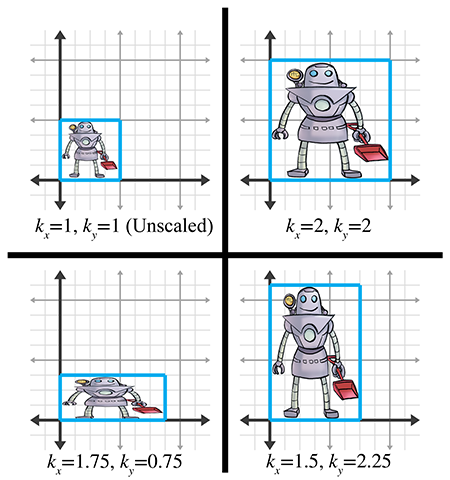 BeiJiaan
BeiJiaan